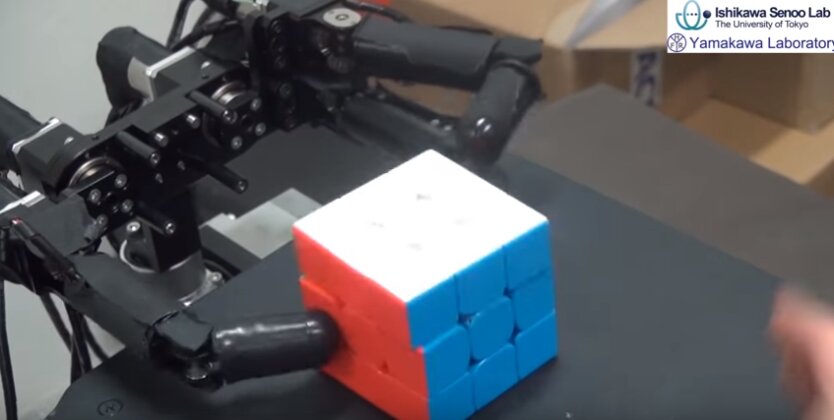
Японские инженеры создали робота с тремя пальцами, умеющего собирать кубик Рубика.
Об этом сообщает N+1.
Он оснащен высокочастотной системой компьютерного зрения, вычисляющей положение центра масс кубика с частотой 500 раз в секунду, а также умеет выполнять три вида движений пальцами, причем он способен выполнять все три вида подряд за одну секунду. На разработку обратило внимание издание IEEE Spectrum, доклад будет представлен на конференции IROS 2018.
Инженеры много лет создают роботов для сборки кубика Рубика и их разработки уже давно обогнали людей — текущий рекорд роботизированной сборки составляет 0,38 секунды, а среди людей лучшего результата недавно добился австралиец, собравший головоломку за 4,22 секунды. Но принцип сборки, используемый в этих роботах, заметно отличается от того, как решают головоломку люди. Как правило, в них используются либо моторизированные стержни, жестко закрепляемые на центре каждой стороны куба, либо манипуляторы, держащие куб с противоположных сторон.
В новом роботе, разработанном специалистами из лаборатории Масатоси Исикавы (Masatoshi Ishikawa) Токийского университета, для сборки кубика используется другой метод. Инженеры оснастили робота тремя пальцами, каждый из которых состоит из двух секций и приводится в движение двумя моторами. Кроме того, основание, на котором располагаются пальцы, может отклоняться и позволяет роботу переворачивать куб. Помимо этого движения робот может поворачивать одним пальцем сторону куба и поворачивать весь куб. Интересно, что во время последнего движения робот полностью отпускает куб на время вращения и ловит его после поворота на нужный угол.
Благодаря использованию динамических движений инженерам удалось добиться достаточно высокой скорости работы робота. Он может выполнить все три движения менее, чем за секунду, причем, эта скорость сохраняется и на больших отрезках времени — за десять секунд робот успевает выполнить 30 движений.
Подписывайтесь на канал «Хвилі» в Telegram, страницу «Хвилі» в Facebook